SKEDSOFT
In this section we introduced several different kinds of agents and environments. In all cases, however, the nature of the connection between them is the same: actions are done by the agent on the environment, which in turn provides percepts to the agent. First, we will describe the different types of environments and how they affect the design of agents. Then we will describe environment programs that can be used as testbeds for agent programs.
Properties of environments: Environments come in several flavors. The principal distinctions to be made are as follows: Accessible vs. inaccessible. If an agent’s sensory apparatus gives it access to the complete state of the environment, then we say that the environment is accessible to that agent. An environment is effectively accessible if the sensors detect all aspects that are relevant to the choice of action. An accessible environment is convenient because the agent need not maintain any internal state to keep track of the world.
Deterministic vs. nondeterministic.: If the next state of the environment is completely determined by the current state and the actions selected by the agents, then we say the environment is deterministic. In principle, an agent need not worry about uncertainty in an accessible, deterministic environment. If the environment is inaccessible, however, then it may appear to be nondeterministic. This is particularly true if the environment is complex, making it hard to keep track of all the inaccessible aspects. Thus, it is often better to think of an environment as deterministic or nondeterministic from the point of view of the agent.
Episodic vs. nonepisodic.: In an episodic environment, the agent’s experience is divided into “episodes.” Each episode consists of the agent perceiving and then acting. The quality of its action depends just on the episode itself, because subsequent episodes do not depend on what actions occur in previous episodes. Episodic environments are much simpler because the agent does not need to think ahead.
Static vs. dynamic. If the environment can change while an agent is deliberating, then we say the environment is dynamic for that agent; otherwise it is static. Static environments are easy to deal with because the agent need not keep looking at the world while it is deciding on an action, nor need it worry about the passage of time. If the environment does not change with the passage of time but the agent’s performance score does, then we say the environment is semidynamic.
Discrete vs. continuous.: If there are a limited number of distinct, clearly defined percepts and actions we say that the environment is discrete. Chess is discrete there are a fixed number of possible moves on each turn. Taxi driving is continuous—the speed and location of the taxi and the other vehicles sweep through a range of continuous values.
We will see that different environment types require somewhat different agent programs to deal with them effectively. It will turn out, as you might expect, that the hardest case is inaccessible, nonepisodic, dynamic, and continuous. It also turns out that most real situations are so complex that whether they are really deterministic is a moot point; for practical purposes, they must be treated as nondeterministic.
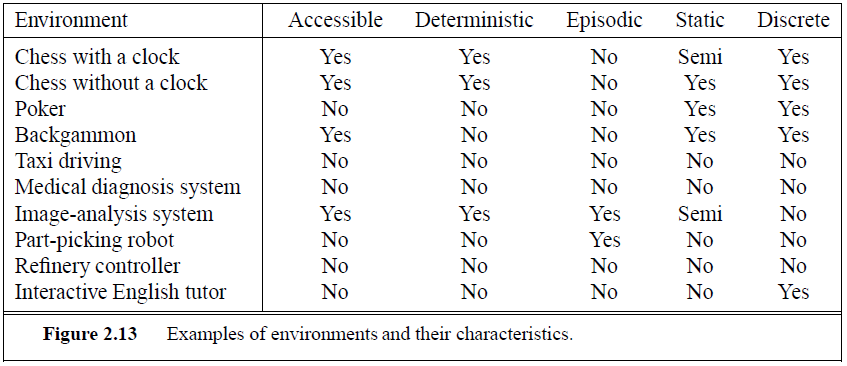
Figure 2.13 lists the properties of a number of familiar environments. Note that the answers can change depending on how you conceptualize the environments and agents. For example, poker is deterministic if the agent can keep track of the order of cards in the deck, but it is nondeterministic if it cannot. Also, many environments are episodic at higher levels than the agent’s individual actions. For example, a chess tournament consists of a sequence of games; each game is an episode, because (by and large) the contribution of the moves in one game to the agent’s overall performance is not affected by the moves in its next game. On the other hand, moves within a single game certainly interact, so the agent needs to look ahead several moves.
Environment programs: The generic environment program in Figure 2.14 illustrates the basic relationship between agents and environments. In this book, we will find it convenient for many of the examples and exercises to use an environment simulator that follows this program structure. The simulator takes one or more agents as input and arranges to repeatedly give each agent the right percepts and receive back an action. The simulator then updates the environment based on the actions, and possibly other dynamic processes in the environment that are not considered to be agents (rain, for example).
The environment is therefore defined by the initial state and the update function. Of course, an agent that works in a simulator ought also to work in a real environment that provides the same kinds of percepts and accepts the same kinds of actions. The procedure correctly exercises the agents in an environment. For some kinds of agents, such as those that engage in natural language dialogue, it may be sufficient simply to observe their behavior. To get more detailed information about agent performance, we insert some performance measurement code. The function RUN-EVAL-ENVIRONMENT, shown in Figure 2.15, does this; it applies a performance measure to each agent and returns a list of the resulting scores. The scores variable keeps track of each agent’s score. In general, the performance measure can depend on the entire sequence of environment states generated during the operation of the program.