SKEDSOFT
Regression Planning
- • Backward-chaining from goal state to initial state
- • Regression situation-space planning is usually more efficient than progression because many operators are applicable at each state, yet only a small number of operators are applicable for achieving a given goal
- • Hence, regression is more goal-directed than progression situation-space planning
- • Disadvantage: cannot always find a plan even if one exists!
Algorithm:
- Start with goal node corresponding to goal to be achieved
- Choose an operator that will add one of the goals
- Replace that goal with the operator's preconditions
- Repeat steps #2-#3 until you have reached the initial state
- While backward-chaining is performed by STRIPS in terms of the generation of goals, sub-goals, sub-sub-goals, etc., operators are used in the forward direction to generate successor states, starting from the initial state, until a goal is found.
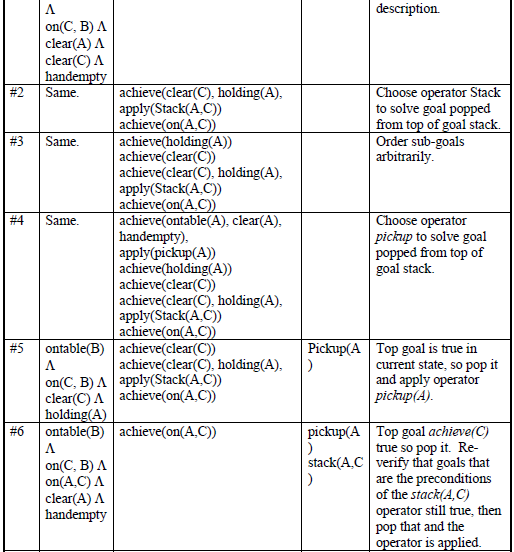
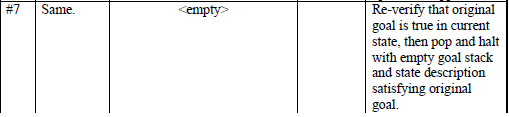
The work through of the regression algorithm for the Blocks World example is shown below.

Goal Interaction: Most planning algorithms assume that the goals to be achieved are independent or nearly independent in the sense that each can be solved separately and then the solutions concatenated together. If the order of solving a set of goals (either the original goals or a set of sub-goals which are the preconditions of an operator) fails because solving a latter goal undoes an earlier goal, then this version of the STRIPS algorithm fails. Hence, situation-space planners do not allow for interleaving of steps in any solution it finds.
Principle of Least Commitment: The principle of least commitment is the idea of never making a choice unless required to do so. The advantage of using this principle is you won't have to backtrack later! In planning, one application of this principle is to never order plan steps unless it's necessary for some reason. So, partial-order planners exhibit this property because constraint ordering steps will only be inserted when necessary. On the other hand, situation-space progression planners make commitments about the order of steps as they try to find a solution and therefore may make mistakes from poor guesses about the right order of steps.