SKEDSOFT
Introduction: The job of AI is to design the agent program: a function that implements the agent mapping from percepts to actions. We assume this program will run on some sort of computing device, which we will call the architecture. Obviously, the program we choose has to be one that the architecture will accept and run. The architecture might be a plain computer, or it might include special-purpose hardware for certain tasks, such as processing camera images or filtering audio input. It might also include software that provides a degree of insulation between the raw computer and the agent program, so that we can program at a higher level. In general, the architecture makes the percepts from the sensors available to the program, runs the program, and feeds the program’s action choices to the effectors as they are generated. The relationship among agents, architectures, and programs can be summed up as follows:
agent = architecture program
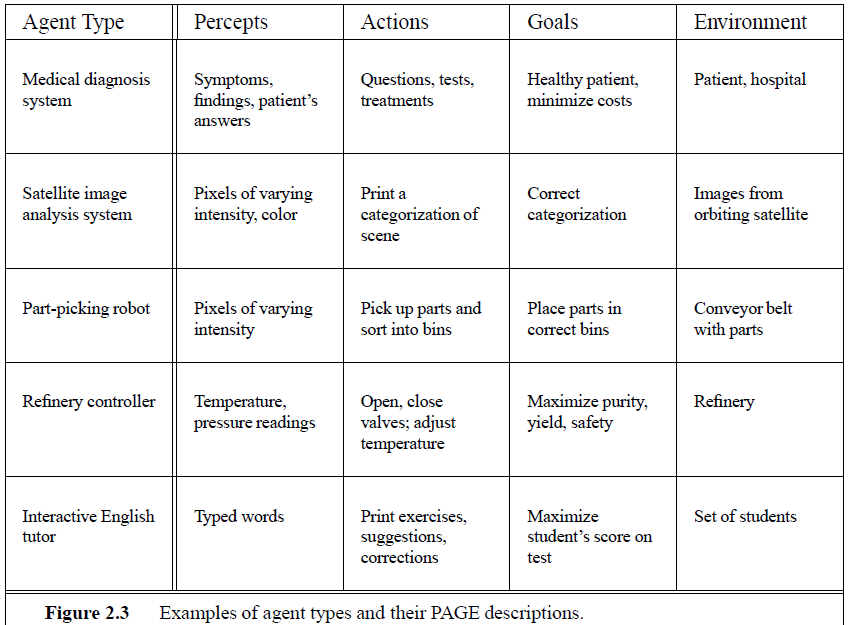
Most of this book is about designing agent programs, although Chapters 24 and 25 deal directly with the architecture. Before we design an agent program, we must have a pretty good idea of the possible percepts and actions, what goals or performance measure the agent is supposed to achieve, and what sort of environment it will operate in.5 These come in a wide variety. Figure 2.3 shows the basic elements for a selection of agent types.
It may come as a surprise to some readers that we include in our list of agent types some programs that seem to operate in the entirely artificial environment defined by keyboard input and character output on a screen. “Surely,” one might say, “this is not a real environment, is it?” In fact, what matters is not the distinction between “real” and “artificial” environments, but the complexity of the relationship among the behavior of the agent, the percept sequence generated by the environment, and the goals that the agent is supposed to achieve. Some “real” environments are actually quite simple. For example, a robot designed to inspect parts as they come by on a conveyer belt can make use of a number of simplifying assumptions: that the lighting is always just so, that the only thing on the conveyer belt will be parts of a certain kind, and that there are only two actions—accept the part or mark it as a reject.
In contrast, some software agents (or software robots or softbots) exist in rich, unlimited domains. Imagine a softbot designed to fly a flight simulator for a 747. The simulator is a very detailed, complex environment, and the software agent must choose from a wide variety of actions in real time. Or imagine a softbot designed to scan online news sources and show the interesting items to its customers. To do well, it will need some natural language processing abilities, it will need to learn what each customer is interested in, and it will need to dynamically change its plans when, for example, the connection for one news source crashes or a new one comes online. Some environments blur the distinction between “real” and “artificial.” In the ALIVE environment (Maes et al., 1994), software agents are given as percepts a digitized camera image of a room where a human walks about. The agent processes the camera image and chooses an action. The environment also displays the camera image on a large display screen that the human can watch, and superimposes on the image a computer graphics rendering of the software agent. One such image is a cartoon dog, which has been programmed to move toward the human (unless he points to send the dog away) and to shake hands or jump up eagerly when the human makes certain gestures.
The most famous artificial environment is the Turing Test environment, in which the whole point is that real and artificial agents are on equal footing, but the environment is challenging enough that it is very difficult for a software agent to do as well as a human. Section 2.4 describes in more detail the factors that make some environments more demanding than others.
Agent programs: We will be building intelligent agents throughout the book. They will all have the same skeleton, namely, accepting percepts from an environment and generating actions. The early versions of agent programs will have a very simple form (Figure 2.4). Each will use some internal data structures that will be updated as new percepts arrive. These data structures are operated on by the agent’s decision-making procedures to generate an action choice, which is then passed to the architecture to be executed.
There are two things to note about this skeleton program. First, even though we defined the agent mapping as a function from percept sequences to actions, the agent program receives only a single percept as its input. It is up to the agent to build up the percept sequence in memory, if it so desires. In some environments, it is possible to be quite successful without storing the percept sequence, and in complex domains, it is infeasible to store the complete sequence.
Second, the goal or performance measure is not part of the skeleton program. This is because the performance measure is applied externally to judge the behavior of the agent, and it is often possible to achieve high performance without explicit knowledge of the performance measure.