SKEDSOFT
Introduction:
When a vehicle travels round a bend, the inside wheel must follow a tighter curve than the outside wheel. To achieve this, the geometry of the steering must be arranged to turn the inside wheel through a larger angle than the outside wheel. The ‘Ackerman’ steering geometry provides a simple solution to this problem.
Representation of true Ackerman mechanism:
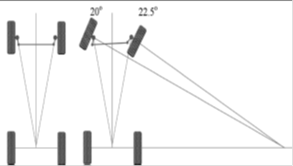
- This geometry results in the inside wheel turning through a smaller radius than the outside wheel. This allows the vehicle to travel around a curve without scrubbing the tyres.
- In practice the steering linkage doesn’t need to produce true Ackerman. It is achieved by a combination of the steered angle and the slip angle produced by the cornering force.
- The slip angle on the outside wheel is greater than that of the inner and this produces varying degrees of dynamic Ackerman effect.
- Ackerman’s steering gear mechanism is based on Ackerman’s principle of steering. The mechanism consists of a cross link BC connected to short axles AL and DM of front wheels through short arms AB and CD. These form the bell crank levers LAB and MDC. In case of straight motion of automobile the cross-link BC remains parallel to AD and short links AB and CD both make angle from the horizontal axis of chassis.
- Fundamental equation of steering is satisfied when the links AB and BC are proportioned suitably and angle is selected suitably. The condition for correct steering is :
Cot θ- cot φ= a/l
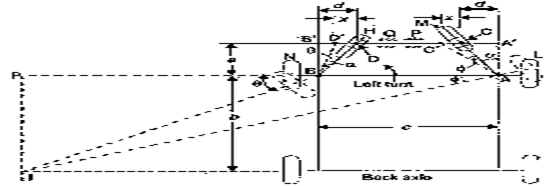
- The angles θ and φ are shown in Figure and distances ‘a’ and ‘l’ are also shown.
- The value of a/l lies between 0.4 and 0.5. It is generally taken near to average of two values, i.e. 0.455.
- The mechanism used for automatically adjusting the values of θ and φ for correct steering is known as Ackerman’s steering gear mechanism. There are three values of angle φ for correct steering corresponding to three cases :
(a) When vehicle is running straight,
(b) When vehicle is turning to right, and
(c) When vehicle is turning to the left.
