SKEDSOFT
PI controllers
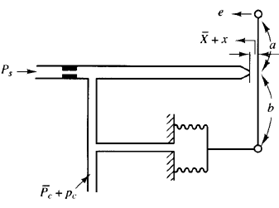
Fig 1: Pneumatic proportional controller
Consider the proportional controller shown in Figure 1(a). Considering small changes in the variables, we can show that the addition of delayed positive feedback will modify this proportional controller to a proportional-plus-integral controller, commonly called a PI controller.
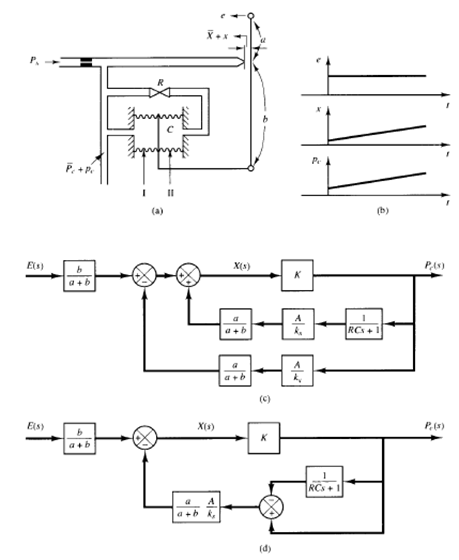
Fig 2: (a) Pneumatic proportional-plus-integral controller; (b) step change in e and the corresponding changes in x and pc plotted versus t; (c) block diagram of the controller; (d) simplified block diagram
Consider the pneumatic controller shown in Figure 2(a). The operation of this controller is as follows: The bellows denoted by I is connected to the control pressure source without any restriction. The bellows denoted by II is connected to the control pressure source through a restriction. Let us assume a small step change in the actuating error. This will cause the back pressure in the nozzle to change instantaneously. Thus a change in the control pressure pc also occurs instantaneously.
