SKEDSOFT
Quadratic factors in Bode diagram
Control systems often possess quadratic factors of the form

If  this quadratic factor can be expressed as a product of two first-order factors with real poles. If
this quadratic factor can be expressed as a product of two first-order factors with real poles. If  , this quadratic factor is the product of two complex conjugate factors. Asymptotic approximations to the frequency-response curves are not accurate for a factor with low values of
, this quadratic factor is the product of two complex conjugate factors. Asymptotic approximations to the frequency-response curves are not accurate for a factor with low values of  This is because the magnitude and phase of the quadratic factor depend on both the corner frequency and the damping ratio
This is because the magnitude and phase of the quadratic factor depend on both the corner frequency and the damping ratio
The asymptotic frequency-response curve may be obtained as follows:
Since

for low frequencies such that ω << ωn, the log magnitude becomes

The low-frequency asymptote is thus a horizontal line at 0 dB. For high frequencies such that ω >> ωn, the log magnitude becomes
The equation for the high-frequency asymptote is a straight line having the slope -40 dB/decade since
The high-frequency asymptote intersects the low-frequency one at ω = ωn since at this frequency
This frequency, ωn> is the corner frequency for the quadratic factor considered.
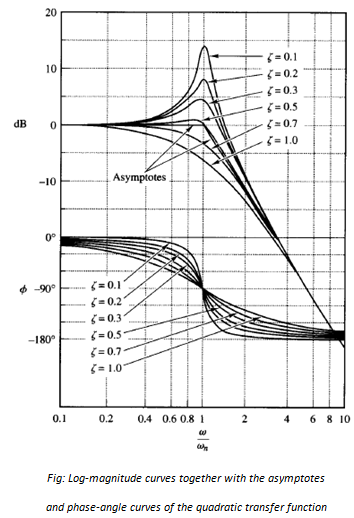
The two asymptotes just derived are independent of the value of  Near the frequency ω = ωn, a resonant peak occurs. The damping ratio determines the magnitude of this resonant peak. Errors obviously exist in the approximation by straight-line asymptotes. The magnitude of the error depends on the value of It is large for small values of Figure shows the exact log-magnitude curves together with the straight-line asymptotes and the exact phase-angle curves for the quadratic factor with several values of If corrections are desired in the asymptotic curves, the necessary amounts of correction at a sufficient number of frequency points may be obtained from Figure.
Near the frequency ω = ωn, a resonant peak occurs. The damping ratio determines the magnitude of this resonant peak. Errors obviously exist in the approximation by straight-line asymptotes. The magnitude of the error depends on the value of It is large for small values of Figure shows the exact log-magnitude curves together with the straight-line asymptotes and the exact phase-angle curves for the quadratic factor with several values of If corrections are desired in the asymptotic curves, the necessary amounts of correction at a sufficient number of frequency points may be obtained from Figure.
