SKEDSOFT
Root sensitivity of a control system
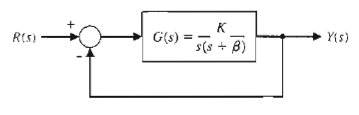
Fig: 1 A feedback control system.
The characteristic equation of the feedback control system shown in Figure 1 is
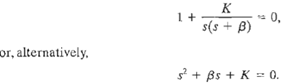
The gain K will be considered to be the parameter α. Then the effect of a change in each parameter can be determined by utilizing the relations

where α0 and βo are the nominal or desired values for the parameters α and β, respectively. We shall consider the case when the nominal pole value is β0 = 1 and the desired gain is α0 = K = 0.5. Then the root locus can be obtained as a function of α = K by utilizing the root locus equation
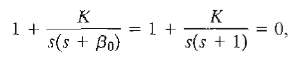
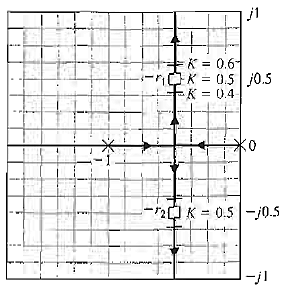
Fig: 2 The root locus for K
The nominal value of gain K = α0 = 0.5 results in two complex roots, —ri = -0.5 j0.5 and —r2 =  , as shown in Figure 2. To evaluate the effect of unavoidable changes in the gain, the characteristic equation with α = α0 ± Δα becomes
, as shown in Figure 2. To evaluate the effect of unavoidable changes in the gain, the characteristic equation with α = α0 ± Δα becomes

