SKEDSOFT
Stability of a second-order system:
A second-order system is described by the two first-order differential equations

where the dot notation implies the first derivative and u(t) is the input.
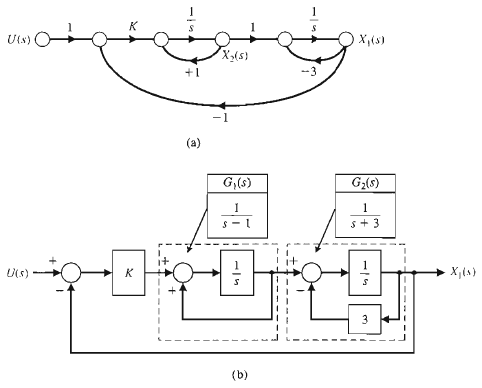
Fig: 1 (a) Flow graph model for state variable equations (b) Block diagram model.
The flow graph model of this set of differential equations is shown in Figure 1(a) and the block diagram model is shown in Figure 1(b). Using Mason's signal-flow gain formula, we note three loops:
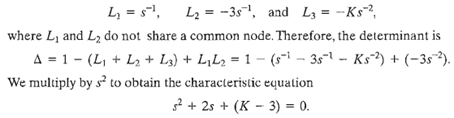
Since all coefficients must be positive, we require K > 3 for stability. A similar analysis can be undertaken using the block diagram. Closing the two feedback loops yields the two transfer functions

