SKEDSOFT
State-space equations:
The equations of x and y can be written as:
where Equation x(t) is the state equation and Equation y(t) is the output equation. If vector functions f and/or g involve time t explicitly, then the system is called a time-varying system.
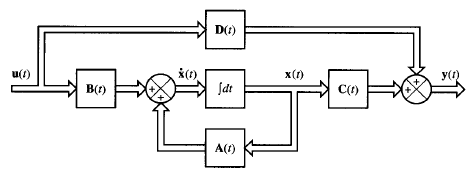
Fig: Block diagram of the linear continuous time control system represented in state space
If the above equations are linearized about the operating state, then we have the following linearized state equation and output equation:
where A(t) is called the state matrix, B(t) the input matrix, C(t) the output matrix, and D(t) the direct transmission matrix.
If vector functions f and g do not involve time t explicitly then the system is called a time-invariant system. In this case, the above equation can be simplified to