SKEDSOFT
State-space representation of nth-order systems of linear differential equations in which the forcing function involves derivative terms:
If the differential equation of the system involves derivatives of the forcing function, such as

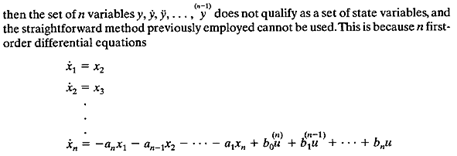
where X1 = y, may not yield a unique solution.
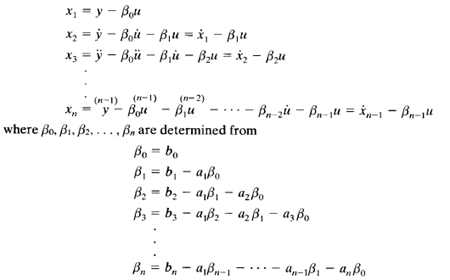
The main problem in defining the state variables for this case lies in the derivative terms on the right-hand side of the last of the preceding n equations. The state variables must be such that they will eliminate the derivatives of u in the state equation.
One way to obtain a state equation and output equation is to define the following n variables as a set of n state variables: