SKEDSOFT
Static position error constant Kv:
The steady-state error of the system with a unit-ramp input is given by
Thus, the steady-state error in terms of the static velocity error constant Kv is given by

The term velocity error is used here to express the steady-state error for a ramp input. The dimension of the velocity error is the same as the system error. That is, velocity error is not an error in velocity, but it is an error in position due to a ramp input.
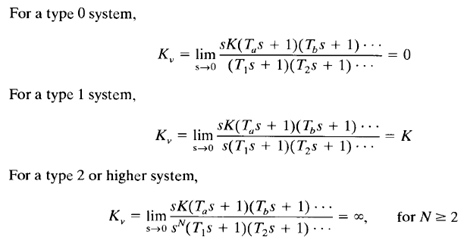
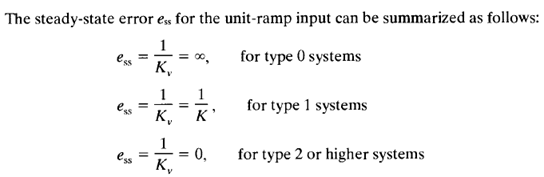
The foregoing analysis indicates that a type 0 system is incapable of following a ramp input in the steady state. The type 1 system with unity feedback can follow the ramp input with a finite error.
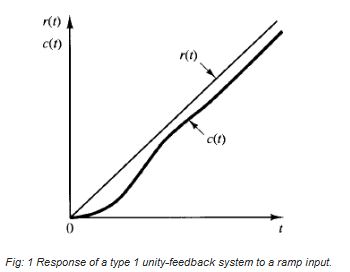
In steady-state operation, the output velocity is exactly the same as the input velocity, but there is a positional error. This error is proportional to the velocity of the input and is inversely proportional to the gain K. Figure 1 shows an example of the response of a type 1 system with unity feedback to a ramp input. The type 2 or higher system can follow a ramp input with zero error at steady state.
