SKEDSOFT
Transient response of higher-order systems
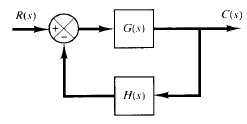
Fig: 1 Control system
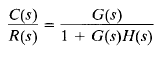
Consider the system shown in fig 1, the closed loop transfer function is
In general, G(s) and R(s) are given as ratios of polynomials in s, or

where p(s), q(s), n(s), and d(s) are polynomials in s. The closed-loop transfer function given by Equation above may then be written
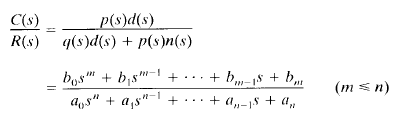
The transient response of this system to any given input can be obtained by a computer simulation. If an analytical expression for the transient response is desired, then it is necessary to factor the denominator polynomial. Once the numerator and the denominator have been factored, C(s)/R(s) can be written as
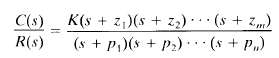
Let us examine the response behavior of this system to a unit-step input. Consider first the case where the closed-loop poles are all real and distinct. For a unit-step input, Equation above can be written as

If all closed-loop poles lie in the left-halfs plane, the relative magnitudes of the residues determine the relative importance of the components in the expanded form of C(s).lf there is a closed-loop zero close to a closed-loop pole, then the residue at this pole is small and the coefficient of the transient-response term corresponding to this pole becomes small. A pair of closely located poles and zeros will effectively cancel each other. If a pole is located very far from the origin, the residue at this pole may be small.
The transients corresponding to such a remote pole are small and last a short time. Terms in the expanded form of C(s) having very small residues contribute little to the transient response, and these terms may be neglected. If this is done, the higher-order system may be approximated by a lower-order one. (Such an approximation often enables us to estimate the response characteristics of a higher-order system from those of a simplified one.) Next, consider the case where the poles of C(s) consist of real poles and pairs of complex-conjugate poles.
