SKEDSOFT
Tuning rules for PID controllers
PID control of plants:
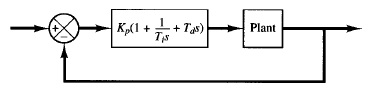
Fig: 1 PID control of a plant
Figure 1 shows a PID control of a plant. If a mathematical model of the plant can be derived, then it is possible to apply various design techniques for determining parameters of the controller that will meet the transient and steady-state specifications of the closed-loop system. However, if the plant is so complicated that its mathematical model cannot be easily obtained, then analytical approach to the design of a PID controller is not possible.
Then we must resort to experimental approaches to the tuning of PID controllers.
The process of selecting the controller parameters to meet given performance specifications is known as controller tuning. Ziegler and Nichols suggested rules for tuning PID controllers (meaning to set values Kp , Ti , and Td) based on experimental step responses or based on the value of Kp that results in marginal stability when only the proportional control action is used. Ziegler-Nichols rules, which are presented in the following, are very convenient when mathematical models of plants are not known.
(These rules can, of course, be applied to the design of systems with known mathematical models.)
