SKEDSOFT
In typical applications of acquisition and processing of signals in a mechatronic system, the filtering task would involve the removal of signal components in a specific frequency range. In this context we can identify the following four broad categories of filters:
1. Low-pass filters
2. High-pass filters
3. Band-pass filters
4. Band-reject (or notch) filters
The ideal frequency-response characteristic of each of these four types of filters Note that only the magnitude of the frequency response function (magnitude of the frequency transfer function) is shown.
It is understood, however, that the phase distortion of the input signal also should be small within the pass band (the allowed frequency range).
Practical filters are less than ideal. Their frequency response functions do not exhibit sharp cutoffs as and, furthermore, some phase distortion will be unavoidable.
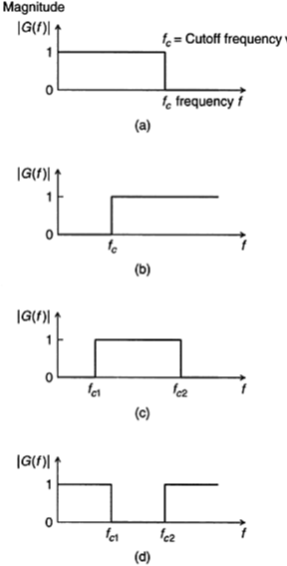
Ideal filter characteristics: (a) Low-pass filter, (b) High-pass filter, (c) Band-pass filter, (d) Band-reject (notch)
filter.
