SKEDSOFT
The second source of error arises from the fact that timer events may not be acted upon by the kernel in time order. In some operating systems (e.g., Windows NT 4.0 and Linux), when more than one timer is found expired at a clock interrupt, the kernel takes care of the timer with the latest expiration time first and in decreasing time order. In other words, it services timer events in LIFO order. Therefore, if the order of occurrences of timer events is important, you will need to take care of this matter. For example, if two timer expiration times are within the same clock interrupt period, you need to give the timer that is supposed to trigger an earlier activity a later expiration time.
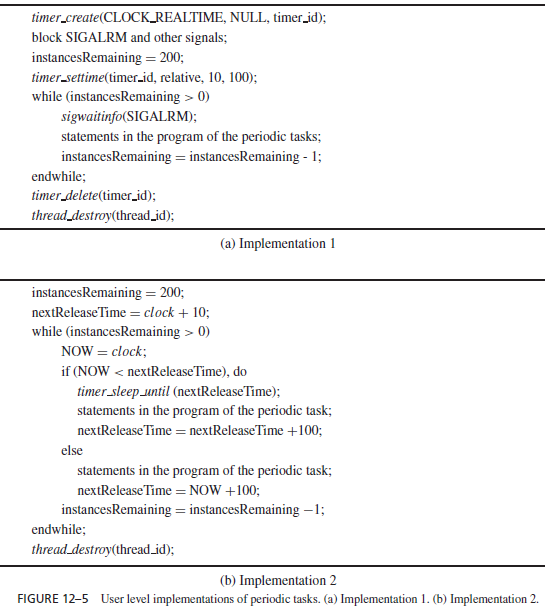
Release-Time Jitters of Periodic Tasks. We conclude our discussion on timers by looking closely at the user-level implementations of a periodic task in Figure 12–5. In particular, we ask what can cause jitters in the release times of the periodic thread. Suppose that the kernel finishes creating the thread and places it in the ready queue at time t . The programmer’s intention is for the thread to be released for the first time at time t 10.We see that the actual first release time can be later than this time because (1) the thread may be preempted and not scheduled until a later time and (2) it takes some time to create a timer (and to get the current time) when the thread starts to execute. If our time unit is millisecond, the delay due to factor (2) is small and can be neglected, but the delay due to factor (1) is arbitrary. Therefore, the implementations are correct only if we accept that t 10 is the earliest release time of the first instance, while the actual release time of this instance may be much later.
Similarly, 100 time units are the minimum length of time between the release times of instances of this task. The subsequent instances of the thread will be released periodically only if the while loop always completes within 100 time units. According to implementation 2, if the response time of an instance of the thread exceeds 100, the next instance is released as soon as the current instance completes. (Again, the next release can be delayed since the thread can be preempted between iterations of the loop.) In contrast, the timer in implementation 1 continues to signal every 100 time units. If a signal arrives while the thread is executing its program, the signal is blocked. The pseudocode in Figure 12–5(a) does not describe a correct implementation of a periodic task because it neglects this situation. In general, Real-Time POSIX signals that arrive while blocked are queued, but not SIGARLM signals. Instead, the number of times the SIGARLM signal has arrived while the signal is blocked is indicated by the timer overrun count. By examining this count, the thread can determine when the code of the periodic task should be executed again. In any case, the periodic task is not truly periodic. Moreover, because the thread can be preempted for an arbitrary amount of time, the interrelease time of consecutive instances can be arbitrarily large.