SKEDSOFT
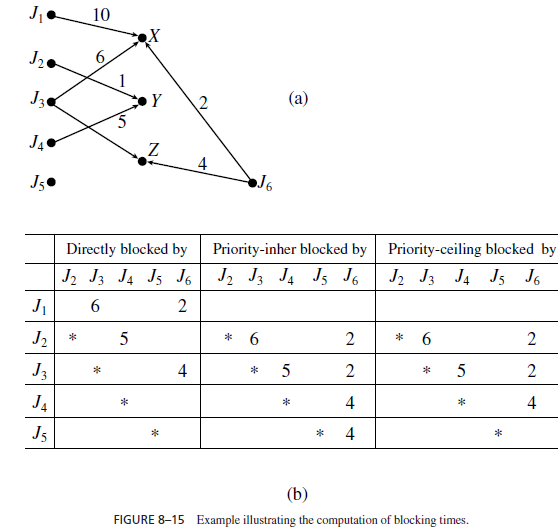
Duration ofBlocking: Although in principle every job is blocked at most once for the duration of one outermost critical section, the worst-case blocking time bi (rc) due to resource conflict of each task is in general larger in a dynamic-priority system than in a fixed-priority system. In particular, when it is possible for the jobs in every task to have a higher priority and preempt jobs in every other task, the worst-case blocking time bi (rc) of a task Ti is the execution time of the longest critical sections of all tasks other than Ti . For example, suppose that the jobs in Figure 8–15 are in six periodic tasks which are scheduled on the LIFO basis. The worst-case blocking times of all tasks except T1 (i.e., the task containing J1) are equal to 10, and the worst-case blocking time of T1 is 6.
On the other hand, in a deadline-driven system, jobs with relative deadline Di are never preempted by jobs with relative deadlines equal to or larger than Di . Hence if the job Ji in Figure 8–16 belongs to task Ti, for i = 1, 2, . . . , 6, and the tasks are indexed in order of increasing relative deadlines, then the worst-case blocking times bi (rc) are 6, 6, 5, 4, 4, and 0 when the tasks are scheduled in the EDF basis.