SKEDSOFT
PID controllers
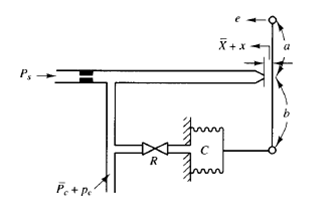
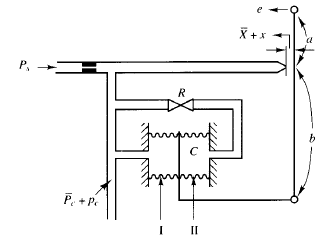
Fig: 1 Fig: 2
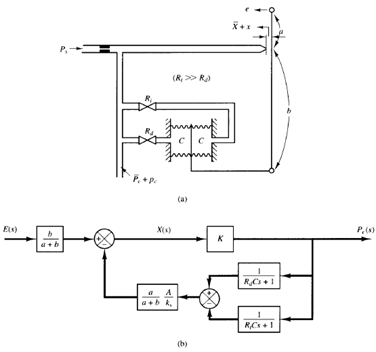
Fig: 3(a) Pneumatic proportional-plus integral-plus derivative controller; (b) block diagram of the controller.
A combination of the pneumatic controllers shown in Figures 1 and 2 yields a proportional-plus-integral-plus-derivative controller, commonly called a PID controller. Figure 3(a) shows a schematic diagram of such a controller. Figure 3(b) shows a block diagram of this controller under the assumption of small variations in the variables.
The transfer function of this controller is
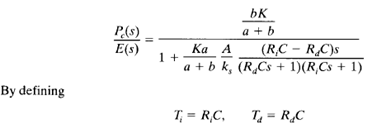

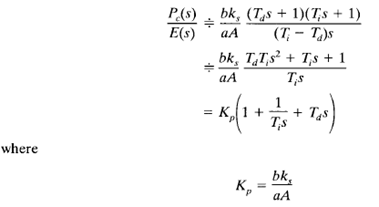
The above equation indicates that the controller shown in Figure 3(a) is a proportional plus-integral-plus-derivative controller (a PID controller).
