SKEDSOFT
Transfer function of an interacting system:
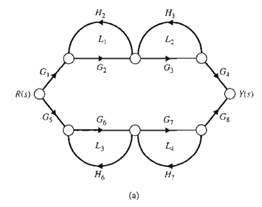
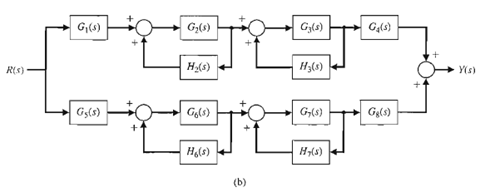
Fig: 1Two-path interacting system (a) Signal-flow graph, (b) Block diagram.
A two-path signal-flow graph is shown in Figure 1(a) and the corresponding block diagram is shown in Figure 1(b). An example of a control system with multiple signal paths is a multi-legged robot. The paths connecting the input R(s) and output Y(s) are

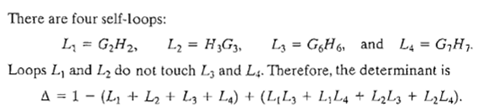
The cofactor of the determinant along path 1 is evaluated by removing the loops that touch path 1 from A. Hence, we have
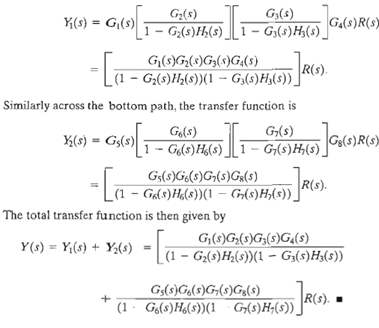
A similar analysis can be accomplished using block diagram reduction techniques. The block diagram shown in Figure 1 (b) has four inner feedback loops within the overall block diagram. The block diagram reduction is simplified by first reducing the four inner feedback loops and then placing the resulting systems in series. Along the top path, the transfer function is