SKEDSOFT
Design Issues: The need to design a generic model for expressing the behavior of an embedded system that avoids the characteristics of difficult tasks. The communication among the computational components of a distributed system forms an integral part of the behavior. At the architecture level we thus need a simple model for describing the communication that captures the system aspect of the real-time message transport without getting detracted by the detailed mechanisms and complexities of the implementation of the transmission channels or the logic of high-level protocols.
A Waistline Communication Model
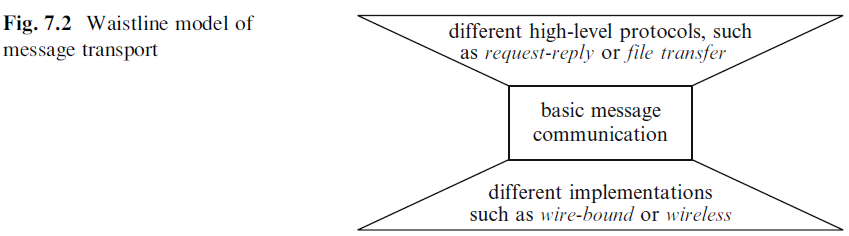
The waistline model depicted in Fig. 7.2 seems to be fit for this purpose. The center of the model, the waistline, depicts the basic message transport service (BMTS) that is provided at the architecture level. C. Since the sender of the message must not be directly impacted by a failure of the receiver, the message flow of the BMTS must be unidirectional.
In the literature, the meaning behind the notion of a datagram service comes close to the semantics of the BMTS, but there are no temporal requirements (e.g., short transport latency, minimal jitter) for a datagram.
Depending on the temporal properties of this BMTS, we distinguish three types of messages:
1. Event-triggered messages. The messages are produced sporadically whenever a significant event occurs at the sender. There is no minimum time between
messages established. No temporal guarantees about the delay between sending a message and receiving a message can be given. In case the sender produces
more messages than the BMTS can handle, either back-pressure is exercised on the sender or messages are lost.
2. Rate-constrained messages. The messages are produced sporadically, however the sender guarantees not to exceed a maximum message rate. Within the
given fault-hypothesis, the BMTS guarantees not to exceed a maximum worstcase transport latency. The jitter depends on the load of the network and is bounded by the worst-case transport latency minus the minimum transport latency.
3. Time-triggered messages. Sender and receiver agree a priori on the exact instants when messages are sent and received. Within the given fault-hypothesis, the BMTS guarantees that the messages will be delivered at the specified instants with a jitter that is determined by the precision of the global time.
There are many different means how to implement the BMTS on wire-bound or wireless channels by low-level protocols. A given BMTS is characterized by the transport latency, the jitter, and the reliability of transporting a single message unidirectionally form a sender to the set of destined receivers. The BMTS provides the basis for building high-level protocols, such as a request-reply protocol, a file-transport protocol, or any other rule-based exchange of message sequences that is captured in a higher-level concept.
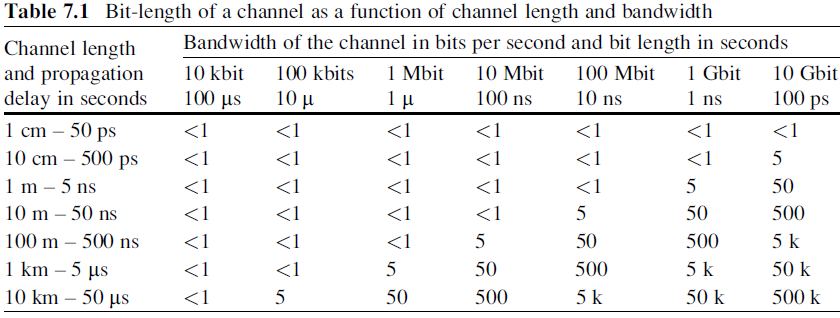
Physical Performance Limitation: Any physical communication channel is characterized by its bandwidth and its propagation delay. The bandwidth denotes the number of bits that can traverse a channel in unit time. The length of the channel and the transmission speed of the wave (electromagnetic, optical) within the channel determine the propagation delay which is the duration it takes for a single bit to travel from one end of the channel to the other end. Because the transmission speed of a wave in a cable is approximately 2/3 of the transmission speed of light in vacuum (about 300,000 km/s), it takes a signal about 5 ms to travel across a cable of 1 km length. The term bit length of a channel is used to denote the number of bits that can traverse the channel within one propagation delay.
Example: If the channel bandwidth is 100 Mbit/s and the channel is 200 m long, the bitlength of the channel is 100 bits, since the propagation delay of this channel is 1 ms.
In a bus system, the data efficiency of any media access protocol on a shared channel is limited by the need to maintain a minimum time interval of one propagation delay between two successive messages. Assume the bit length of a channel to be bl bits and the message length to be m bits. Then an upper bound for the data efficiency of any media access protocol in a bus system is given by:
![]()
If the message length is less than the bit length of the channel, then the best channel utilization that can be realized with any media access protocol is less than
50%. This physical limit has implications for the design of protocols. If a channel is long and supports a high bandwidth, it is wasteful to send short messages.
Flow Control: Flow control is concerned with the control of the speed of information flow between a sender and a receiver (or the communication system, in this case the term congestion control is sometimes used) in such a manner that the communication system and the receiver can keep up with the sender. In any communication scenario, it is the
receiver or the limited capacity of the communication system rather than the sender that determines the maximum speed of communication. We distinguish between the following types of flow control:
