SKEDSOFT
Real-Time Command and Control: The controller at the highest level of a control hierarchy is a command and control system. An Air Traffic Control (ATC) system is an excellent example. Figure 1–5 shows a possible architecture. The ATC system monitors the aircraft in its coverage area and the environment (e.g, weather condition) and generates and presents the information needed by the operators (i.e., the air traffic controllers). Outputs from the ATC system include the assigned arrival times to metering fixes for individual aircraft. As stated earlier, these outputs are reference inputs to on-board flight management systems. Thus, the ATC system indirectly controls the embedded components in low levels of the control hierarchy. In addition, the ATC system provides voice and telemetry links to on-board avionics. Thus it supports the communication among the operators at both levels (i.e., the pilots and air traffic controllers). The ATC system gathers information on the “state” of each aircraft via one or more active radars. Such a radar interrogates each aircraft periodically. When interrogated, an air-
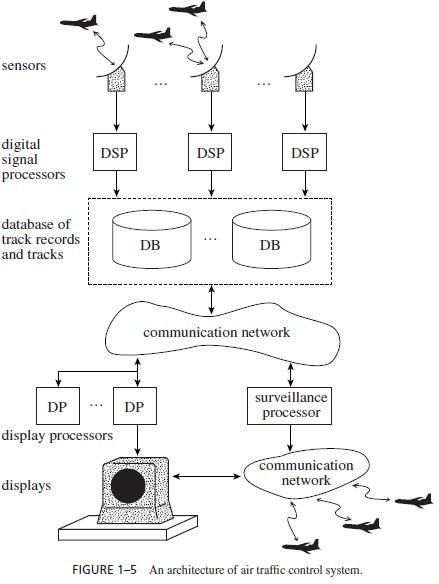
craft responds by sending to the ATC system its “state variables”: identifier, position, altitude, heading, and so on. (In Figure 1–5, these variables are referred to collectively as a track record, and the current trajectory of the aircraft is a track.) The ATC system processes messages from aircraft and stores the state information thus obtained in a database. This information is picked up and processed by display processors. At the same time, a surveillance system continuously analyzes the scenario and alerts the operators whenever it detects any potential hazard (e.g., a possible collision). Again, the rates at which human interfaces (e.g., keyboards and displays) operate must be at least 10 Hz. The other response times can be considerably larger. For example, the allowed response time from radar inputs is one to two seconds, and the period of weather updates is in the order of ten seconds.
From this example, we can see that a command and control system bears little resemblance to low-level controllers. In contrast to a low-level controller whose workload is either purely or mostly periodic, a command and control system also computes and communicates in response to sporadic events and operators’ commands. Furthermore, it may process image and speech, query and update databases, simulate various scenarios, and the like. The resource and processing time demands of these tasks can be large and varied. Fortunately, most of the timing requirements of a command and control system are less stringent. Whereas a low-level control system typically runs on one computer or a few computers connected by a small network or dedicated links, a command and control system is often a large distributed system containing tens and hundreds of computers and many different kinds of networks. In this respect, it resembles interactive, on-line transaction systems (e.g., a stock price quotation system) which are also sometimes called real-time systems.
